Last update: May 23rd, 2017
These instructions are for installing OpenRAVE in Ubuntu 14.04 (Trusty). For the official documentation of OpenRAVE, please refer to http://openrave.org.
From my experience, the best way to install OpenRAVE is to build it from source.
Dependencies
You need to install the following programs:
sudo apt-get install cmake g++ git ipython octave python-dev python-h5py python-numpy \
python-pip python-scipy python-sympy qt4-dev-tools zlib-binNext, you will need to install the following libraries, which are available from the Ubuntu package repository:
sudo apt-get install libassimp-dev libavcodec-dev libavformat-dev libavformat-dev \
libboost-all-dev libboost-date-time-dev libbullet-dev libfaac-dev libfreetype6-dev \
libglew-dev libgsm1-dev liblapack-dev libmpfi-dev libmpfr-dev libode-dev libogg-dev \
libpcre3-dev libpcrecpp0 libqhull-dev libqt4-dev libsoqt-dev-common libsoqt4-dev \
libswscale-dev libswscale-dev libvorbis-dev libx264-dev libxml2-dev libxvidcore-devNow, get the collada-dom-dev package. If you are installing OpenRAVE is very likely that
you have already installed ROS Indigo.
In that case, you can install collada-dom-dev directly:
sudo apt-get update
sudo apt-get install collada-dom-devIf you are not planning to use ROS, install collada-dom-dev from the OpenRAVE PPA:
sudo add-apt-repository ppa:openrave/release
sudo sh -c 'echo "deb-src http://ppa.launchpad.net/openrave/release/ubuntu `lsb_release -cs` main" >> /etc/apt/sources.list.d/openrave-release-`lsb_release -cs`.list'
sudo apt-get update
sudo apt-get install collada-dom-devOpenSceneGraph
OpenRAVE requires OpenSceneGraph 3.4, so we have to build it from source:
cd ~/git
git clone https://github.com/openscenegraph/OpenSceneGraph.git --branch OpenSceneGraph-3.4
cd OpenSceneGraph
mkdir build; cd build
cmake .. -DDESIRED_QT_VERSION=4
make -j `nproc`
sudo make installFCL - The Flexible Collision Library
Install libccd:
sudo apt-add-repository ppa:imnmfotmal/libccd
sudo apt-get update
sudo apt-get install libccdBuild and install fcl version 0.5.0:
cd ~/git
git clone https://github.com/flexible-collision-library/fcl
cd fcl; git reset --hard 0.5.0
mkdir build; cd build
cmake ..
make -j `nproc`
sudo make installsympy Version
Downgrade sympy so that IKFast works properly:
pip install --upgrade --user sympy==0.7.1Building from Source
Now you can build and install OpenRAVE (Tested with commit 81ec501):
cd ~/git
git clone https://github.com/rdiankov/openrave.git
cd openrave; git reset --hard 81ec501
mkdir build; cd build
cmake -DODE_USE_MULTITHREAD=ON -DOSG_DIR=/usr/local/lib64/ ..
make -j `nproc`
sudo make installTesting the Installation
You can check that your installation works by running one of the default examples. For example:
openrave.py --example graspplanningIt should start the graspplanning example:
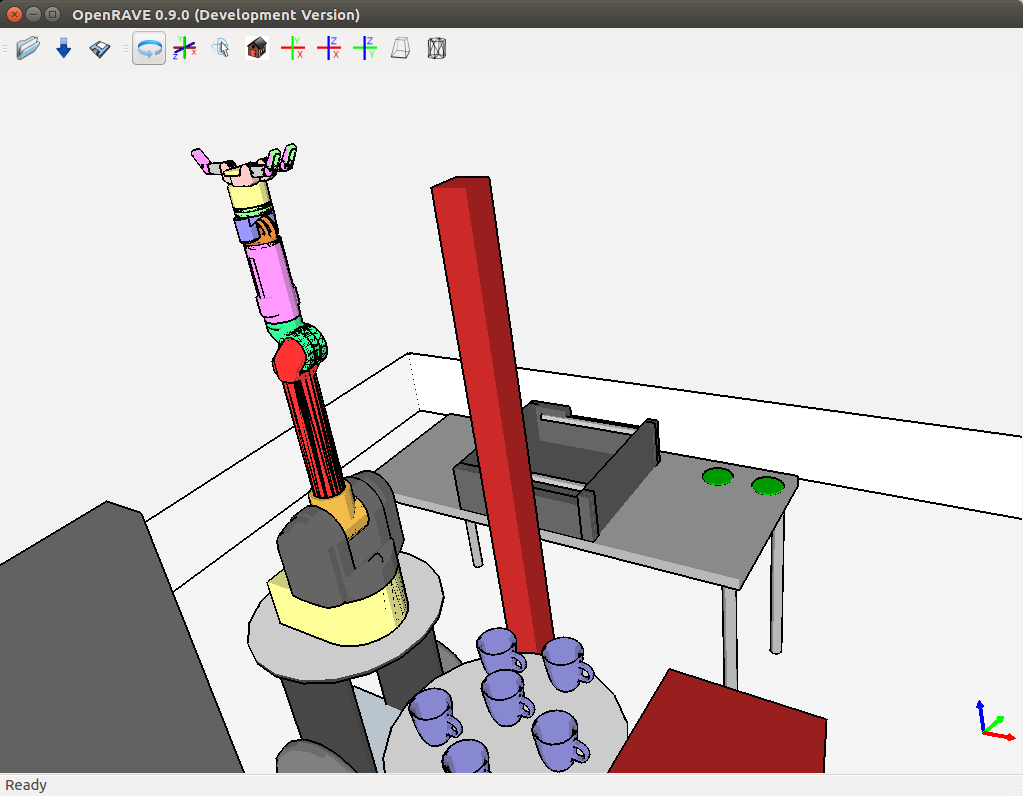
You may see some messages printed in yellow on your command line but they are just warnings that won’t prevent your installation from working.